REDES NEURAIS ARTIFICIAIS APLICADAS EM EXTRAÇÃO DE IMAGENS PARA CLASSIFICAÇÃO AUTÔMOMA DE CORDÕES DE SOLDA
ARTIFICIAL NEURAL NETWORKS APPLIED IN IMAGE EXTRACTION FOR AUTONOMOUS CLASSIFICATION OF WELD BEADS
LAS REDES NEURONALES ARTIFICIALES APLICADAS EN LA EXTRACCIÓN DE IMAGEN PARA LA CLASIFICACIÓN AUTÓNOMA DE LOS CORDONES DE SOLDADURA
Marcio Mendonça1 (mendonca@utfpr.edu.br)
Marco Antônio Ferreira Fionocchio1 (mafinocchio@utfpr.edu.br)
Rogério Vieira Gusmão1 (rogeriogusmao_ivp@hotmail.com)
Ivan Rossato Chrun2 (chrun@gmail.com)
1 Universidade Tecnológica Federal do Paraná, Campus Cornélio Procópio
2 Universidade Tecnológica Federal do Paraná, Campus Curitiba
Resumo
Este trabalho propõe um classificador autônomo ou um auxiliar de diagnósticos para identificação de cordão de solda. O classificador utiliza uma técnica computacional inteligente como tomador de decisões, Redes Neurais Artificiais (RNA), e técnicas de tratamento de imagens para auxiliar a detecção de descontinuidades em cordões de solda. Diversas amostras visualmente consideradas como “boa” e “ruim” dos cordões de solda foram utilizados nesta pesquisa. Desse modo, compa-rando-as com imagens previamente armazenadas, as quais foram utilizadas para treinamento e testes/validação da RNA com bom nível de acerto, para resultados iniciais, de um classificador autônomo; considerando que respostas da rede menor que 0,5 foram arredondados para 0, e maior ou igual a 0,5 foram arredondados para 1. Por conseguinte, a aplicação da técnica proposta tem como foco a identificação de porosidade no cordão de solda. Este tipo de falha está entre as três descontinuidades mais comuns na indústria metal mecânicas.
Palavras-chave: Descontinuidade, Porosidade, Rede Neural Artificial, Descontinuidades de Solda, Inspeção Autônoma.
Abstract
This paper proposes an autonomous classifier or an auxiliary diagnostics to weld bead ID. The classifier uses an intelligent computational technique as decision-maker, Artificial Neural Networks (ANN), and imaging techniques to aid the detection of discontinuities in weld beads. Several weld bead samples visually considered "good" and "bad" were used in this research. Thus, comparing them with previously stored images, which are used for training/validating the ANN with a good level of accuracy, for initial results, of an autonomous classifier; considering that answers lowers than 0.5 are rounded to 0, and higher than 0.5 are rounded to 1. Consequently, the application of the proposed technique aims to identify the porosity in the weld bead. This type of failure is among the three most common discontinuities in the mechanical metal industry.
Keywords: : Discontinuity, Porosity, Artificial Neural Network, Weld Discontinuities, Autonomous Inspection.
Resumen
Este trabajo propone un clasificador autónomo o ayuda de diagnóstico para la identificación del cordón de soldadura. El clasificador utiliza una técnica computacional inteligente como tomador de decisiones, las Redes Neuronales Artificiales (RNA), y las imágenes para ayudar a la desprotección de las discontinuidades en las técnicas de tratamiento de los cordones de soldadura. Varias muestras consideradas visualmente como "bueno" y "malo" de los cordones de soldadura se utilizaron en esta investigación. Por lo tanto, comparando con imágenes almacenadas previamente, que fueron utilizados para la formación y las pruebas / validación de RNA con un buen nivel de exactitud, los resultados iniciales de un clasificador independiente; mientras que las respuestas a la red menor que 0,5 se redondea a 0, y mayor que o igual a 0,5 se han redondeado a 1. Por consiguiente, la aplicación de la técnica propuesta tiene un ID de porosidad para centrarse en el cordón de soldadura. Este tipo de falla se encuentra entre los tres discontinuidades más comunes en la industria metalmecánica.
Palabras clave: La Discontinuidad, La Porosidad, La Red Neuronal Artificial, Descontinuidades de Soldadura, Inspección Autónoma.
Introdução
Este artigo propõe a utilização de uma técnica computacional inteligente clássica, as Redes Neurais Artificiais (RNAs) e técnicas de tratamento de imagens para auxiliar na detecção de descontinuidades em cordões de solda.
No setor metalúrgico, a área de soldagem é muito aplicada, principalmente nas áreas de montagem e manutenção de peças e/ou dispositivos mecânicos. Desse modo, a detecção da qua-lidade da solda, em especial cordões de solda nesse trabalho, é uma área a ser explorada. Além disso, a inspeção de forma autônoma ou semi-autônoma pode ser relevante ao controle de quali-dade de execução da soldagem.
Um exemplo: aplicação e problemática da porosidade na solda industrial. Em situações que apresentam a presença de porosidade em cordões de solda de componentes de eixos automotivos compromete-se a qualidade do produto, podendo levar até mesmo ao sucateamento de todo o conjunto. Porosidade trata-se de um defeito em forma de cavidade que surge devido ao aprisionamento de gases durante a solidificação do metal de solda. Existem várias maneiras de se prevenir a formação de poros em juntas soldadas. Os métodos mais importantes, porém menos investigados, são os métodos metalúrgicos, que buscam reduzir a porosidade através dos parâ-metros de soldagem. (RAMIREZ; HAN; LIU, 1994).
De modo a auxiliar na motivação desse trabalho, atualmente, em muitos casos o controle de qualidade é feito por inspeção visual. E comumente esse tipo de inspeção classificada como ensaio não destrutivo, na análise de cordões de solda. Porém, há falta de mão de obra especiali-zada.
A visão computacional aplicada à inspeção de solda é considerada uma importante ferra-menta de auxílio à inspeção visual (RATNAN, 2008). A inspeção visual exige a interpretação exata ou aproximada da superfície soldada, encontrando-se em pontos de difícil acesso visual, alvo de estudos da captura de imagens em mais de um ângulo.
A descontinuidade é qualquer interrupção da estrutura típica de uma junta soldada, é con-siderada quando não há homogeneidade das características físicas, mecânicas ou metalúrgicas do material ou da solda (MODENESI, 2001). Foram classificadas 40 descontinuidades, contudo, nem todas são consideradas defeitos. O defeito é definido a partir da não conformidade às especi-ficações estabelecidas no projeto em execução, aos valores e à tolerância, para reparos ou substi-tuições da solda.
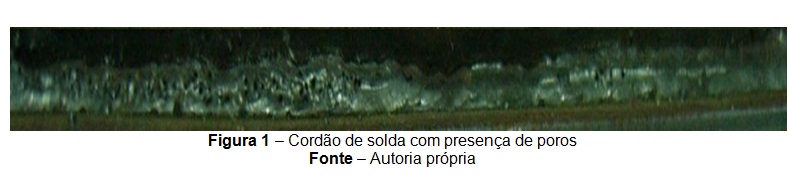
As três descontinuidades em solda mais comuns no setor industrial são: mordedura, trincas e porosidade. Neste trabalho é abordada a identificação de porosidade, considerando que vários fatores influenciam a formação de poros no cordão de solda, como: sujeira, oxidação, umidade, corrente incorreta, velocidade de soldagem alta, composição dos gases incorreta (MODENESI, 2001). Para detecção da porosidade, de um modo geral, utiliza-se a inspeção visual, como no cordão de solda demonstrado na Figura 1. E a classificação proposta será de forma binária, conforme ou não conforme, em outras palavras “boas” ou “ruins”. Desse modo, a tomada de decisão será feita pela RNA após treinamento e validação.
A presença dos poros fragiliza a solda, diminui a resistência e facilita a oxidação. Os poros que não estão na superfície da solda exigem a utilização de outros de ensaios para sua detecção. Alguns fatores que formam poros são: contaminações; oxidação; umidade na superfície do metal de base, no consumível ou no equipamento de soldagem; perturbações no gás de proteção; cor-rente de soldagem excessiva. Segundo Modenesi (2001), a degradação do revestimento ou o consumo excessivo de desoxidantes favorecem a evolução de gás carbônico na poça de fusão e a formação de porosidade.
A presença de porosidade deixa a solda frágil, fato que pode levar a sérias consequências caso não seja corrigido durante o processo de fabricação.
Este trabalho está organizado da seguinte forma: A seção 1 apresenta a uma breve fun-damentação da metodologia empregada no desenvolvimento da pesquisa. A seção 2 apresenta aspectos de desenvolvimento do classificador neural com aplicação de técnicas de visão compu-tacional. A seção 3 mostra resultados; e, finalmente, nas considerações finais, conclui-se e suge-rem-se futuros trabalhos.
1 Metodologia
1.1 Técnica Computacional
O Matlab foi utilizado na implementação da RNA e no tratamento de imagem. Este último aplica-se a duas áreas, a melhoria da informação visual, para interpretação humana; e o proces-samento de dados, para a percepção automática por meio de máquinas. Segundo Gonzáles e Woods (2000), a visão computacional é responsável pela visão artificial de uma máquina e a in-terpretação do meio, através de tratamento e análise das imagens. As informações das imagens capturadas por câmeras de vídeo, sensores e scanners permitem reconhecer, manipular e em alguns casos tomar decisões sobre os objetos que a compõe.
Na maioria dos projetos envolvendo visão computacional, encontram-se algumas caracte-rísticas comuns como, por exemplo, aquisição de imagens, pré-processamento, extração de ca-racterísticas, detecção, segmentação e processamento de alto nível (REHEM; TRINDADE, 2009). No desenvolvimento deste trabalho a maioria delas foi utilizada.
O primeiro passo foi aquisição de imagens com a captura das imagens dos cordões de solda corpos de prova pré-fabricados. As imagens foram registradas tomando cuidado com a uni-formidade de posicionamento da câmera e iluminação do ambiente. Devido ao baixo número de corpos de prova (250 mm) de comprimento, foi necessário particionar as imagens inicialmente obtidas, em cinco partes.

O segundo passo foi extração de características, por métodos de detecção bordas, brilho e contagem de pixels. A extração de características foi fundamental, para a obtenção dos dados numéricos das imagens, por meio de filtro granulométrico presente no Matlab, aplicados a RNA no projeto, possibilitando o reconhecimento de padrões de solda.
Para utilizar o filtro, o primeiro passo é maximizar o contraste de intensidade da imagem. O passo seguinte é redimensionar a intensidade da imagem, preenchendo toda a gama dinâmica de dados, conforme Figura 2.
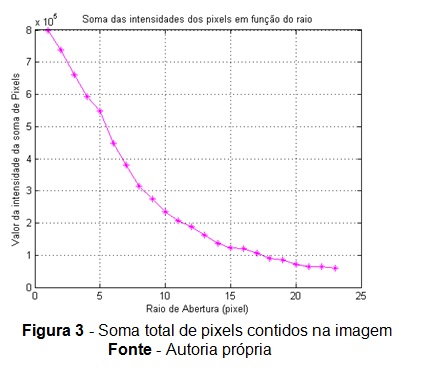
A granulometria detectada pelo filtro calcula a distribuição do tamanho de objetos, sem segmentação e, o tamanho dos flocos de uma imagem, como mostra a Figura 3.
1.2 Redes Neurais Artificiais
Redes Neurais Artificiais são técnicas computacionais inspiradas na estrutura neural de organismos inteligentes, e que adquirem conhecimento através da experiência. Uma rede neural é uma estrutura de processamento de informação distribuída paralelamente na forma de um grafo direcionado, com algumas restrições e definições próprias. Os nós deste grafo são chamados elementos de processamento, e suas arestas são conexões, que funcionam como caminhos de condução instantânea de sinais em uma única direção, de forma que seus elementos de proces-samento podem receber qualquer número de conexões de entrada. Estas estruturas podem pos-suir memória local, e também possuir qualquer número de conexões de saída desde que os sinais nestas conexões sejam os mesmos. Portanto, estes elementos têm na verdade uma única cone-xão de saída, que pode dividir-se em cópias para formar múltiplas conexões, sendo que todos carregam o mesmo sinal (MENDONÇA, 2011).
Redes Neurais Artificiais são aproximadores universais de funções; e algumas de suas aplicações são: reconhecimento de padrões, percepção e controle (HAYKIN, 2008). Existem tra-balhos correlatos na literatura com aplicação de RNA em calibração de câmeras: Pedra e colabo-radores (2013); em inspeção visual, como, por exemplo, o trabalho de Verbancsics e Harguess (2015); o trabalho de Santos e colaboradores (2011), para classificação de padrões de escoamento de petróleo, utiliza Técnicas de Visão Computacional e Redes Neurais Artificiais. Especificamente na área de inspeção de soldas, o trabalho de Ratnan (2008). Nesse contexto, devem-se citar também trabalhos que vislumbram aprimorar arquiteturas das RNA, como, por exemplo, a Tese de Doutorado de Boccato (2013); e trabalhos com arquiteturas recentes baseadas em máquinas desorganizadas, como, por exemplo, o artigo de Boccato e colaboradores (2011).
De um modo geral, as RNAs têm a capacidade de generalização, a qual pode ser definida como a capacidade de se obter saídas corretas para novos dados de entrada a partir de diferentes amostras de treinamento (ZHANG et al., 2003), capacidade explorada nesse trabalho; os conjuntos de treinamento foram escolhidos de forma aleatória. Outra característica é a capacidade de auto-organização ou plasticidade dos neurônios, ou seja, num processo de aprendizagem é possível alterar os padrões de interconexão entre seus elementos (SPANDRI, 2000).
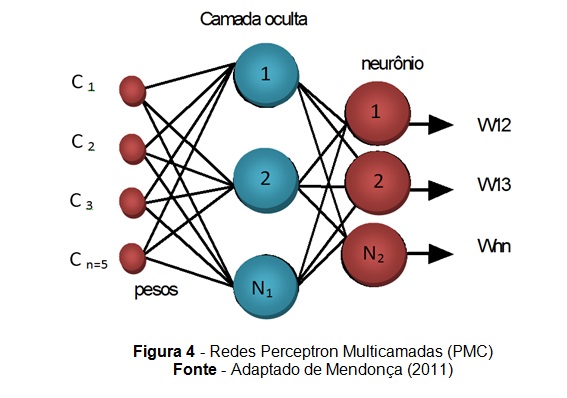
Inspirada nos conceitos e fundamentos citados surgiram diferentes arquiteturas, estruturas e aplicações. Neste trabalho, foi utilizada uma rede clássica, fortemente utilizada na literatura (MENDONÇA, 2011; SILVA; SPATTI; FALUZINO, 2011) Redes Perceptron Multicamadas (PMC). A Figura 4 apresenta a arquitetura clássica multicamada, formada pelos neurônios das camadas de entrada, intermediária e saída interconectada.
O aspecto principal da RNA é o aprendizado, ou seja, sua capacidade de aprender com ambiente e melhorar o desempenho. O algoritmo de aprendizado deve conter um conjunto de re-gras bem definidas para a solução de um problema. Sabe-se, conforme Silva e colaboradores (2010), que há algoritmos específicos para cada modelo de RNA, a diferença está na forma com que cada um modifica seus pesos para alcançar o objetivo desejado.
A RNA escolhida foi a Perceptron multicamadas associada ao método de aprendizagem supervisionado, treinada pelo algoritmo Levenberg Marquadt (HAGAN; MENHAJ, 1994). Esse algoritmo é fortemente utilizado na literatura na sua versão original ou em variações como, por exemplo, o trabalho de Costa e colaboradores (2002).
O passo inicial de aplicação de algoritmos supervisionados é o de treino; é desenvolvido seguindo uma sequência lógica que consiste de: obter o conjunto de amostras de treinamento; associar o vetor de saída desejado para cada amostra, no caso desse trabalho dois valores dis-cretos 0 e 1, valores de saída.
Definida a arquitetura e o algoritmo de treinamento da Rede Neural Artificial, o próximo passo consiste em se definir o número de neurônios da(s) camada(s) intermediárias, as quais po-dem ser de mais de uma, caso o domínio do problema tenha mais de uma base de dados, como por exemplo trabalho de visão computacional em ambientes 2-D ou 3-D por meio de neurocalibra-ção, como por exemplo o trabalho de Mendonça, Castanho e Silva (2003) e de Pedra e colabora-dores (2013).
Esse número pode ser obtido por meio de estimativas iniciais (HAYKIN, 2008), nesse tra-balho foi utilizada a técnica de poda; trata-se de escolher aleatoriamente um número inicial alto de neurônios e, em seguida, vir “podando”, objetivando manter o desempenho (BARRETO, 2007). Após a essa etapa, deve-se especificar a taxa de aprendizagem e precisão requerida, o procedi-mento de escolha de precisão deve ser cuidadosamente observado porque está relacionado com a complexidade do problema em si, como não linearidades, correlação entre as variáveis, ruídos, precisão de aquisição dos dados, entre outros; neste trabalho, por se utilizar dados reais com câ-meras de baixa precisão e baixo custo, estimou-se um erro de 10-5 para os valores estimados pela RNA e os dados reais, em tempo de treinamento.
Um dos principais paradigmas relacionados ao aprendizado de uma RNA, segundo Haykin (2008), é o aprendizado supervisionado; no qual a rede recebe a resposta desejada em relação aos dados de entrada; normalmente utilizado nas Redes Perceptrons Multicamadas (PMC), e conseguintemente utilizado no desenvolvimento desse trabalho.
Nesse contexto, devem-se citar os 3 paradigmas da aprendizagem:
• Aprendizado supervisionado: é baseado em um conjunto de exemplos de estímulo/resposta (ou entrada-saída);
• Aprendizado por reforço: o comportamento da rede é avaliado apenas com base em algum critério numérico, fornecido em instantes espaçados de tempo;
• Aprendizado não-supervisionado: é baseado apenas nos estímulos recebidos pela rede neural. Basicamente, a rede deve aprender a “categorizar” os estímulos.
2 Desenvolvimento do Classificador Neural
A partir das imagens de cordões de solda pré-fabricados de 250 mm de comprimento total.
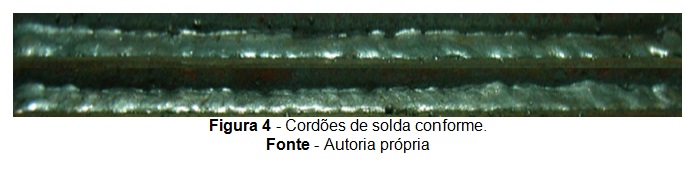
A Figura 4 apresenta cordões de solda conforme.
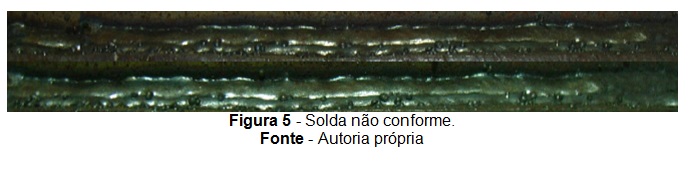
A Figura 5 apresenta cordões de solda não conforme.
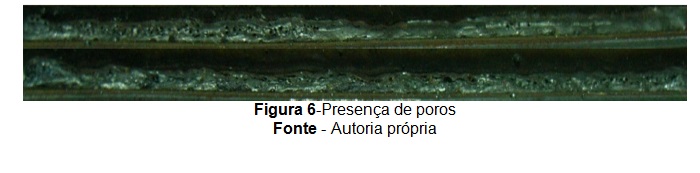
Na Figura 6, as imagens feitas do mesmo ângulo e iluminação, obtendo resultados satisfa-tórios na identificação da presença de poros.
Inicialmente, visando à segmentação de imagens foram realizados testes, com os filtros Sobel para a detecção de contornos no processamento de imagens; e Gradmag para realçar as linhas verticais e horizontais, no fundo escuro, destacando a borda da imagem.
A segmentação das imagens permitiu uma análise visual das características físicas dos cordões de solda, sugerindo padrões, para análise de descontinuidades na solda. Este tipo de recurso é alvo de vários estudos, inclusive na área petrolífera, para escoamentos em tubulações, utilizando rede neural para classificação de padrões de imagem (SANTOS, 2010).
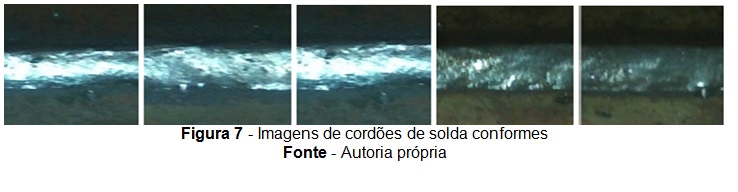
No primeiro experimento, as imagens foram recortadas para melhorar o processamento do software, e nelas aplicadas o filtro. Na Figura 7, foram utilizadas imagens de cordões de solda conformes. A Figura 8 apresenta imagens de cordões de solda não conformes.

Diversos filtros foram utilizados a fim de se detectar quantitativamente resultados que pu-dessem ser apresentados para uma RNA para classificação dos dois padrões inicialmente propos-tos nesta pesquisa. Os resultados obtidos após o tratamento com Gradmag apresentaram diferen-ças, não satisfatórias. Considerando que a olho nu não é possível identificar uma descontinuidade e a interpretação da imagem fica impraticável, observadas nas Figuras 9 e 10.
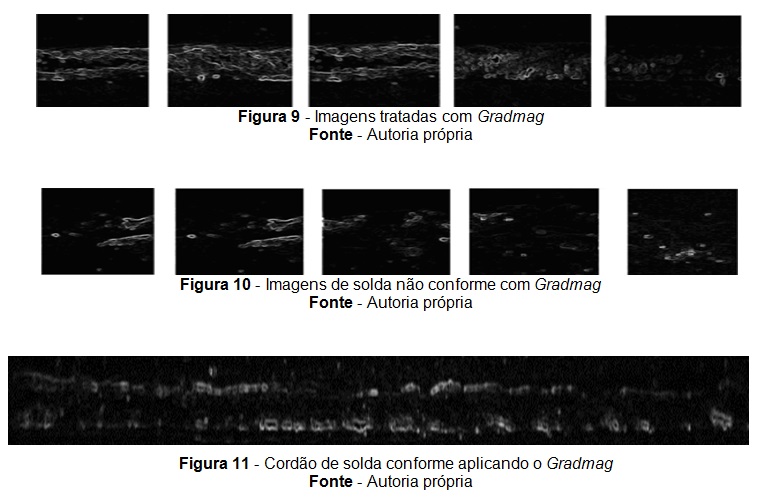
A Figura 11 mostra um exemplo de cordão de solda conforme, e na Figura 12 mostra o cordão de solda com poros, às duas figuras no formato contínuo. Entretanto, somente confirmaram os resultados das anteriores, em que não se pode distinguir a qualidade entre conformidade e não conformidade, termo técnico utilizado nas indústrias.

Já a aplicação do filtro Sobel também não permitiu diferenciar as soldas de boa e má qua-lidade com as características extraídas. Na tentativa de obter um resultado satisfatório foi utilizado o filtro, disponível no MatlabR13, o filtro granulométrico.
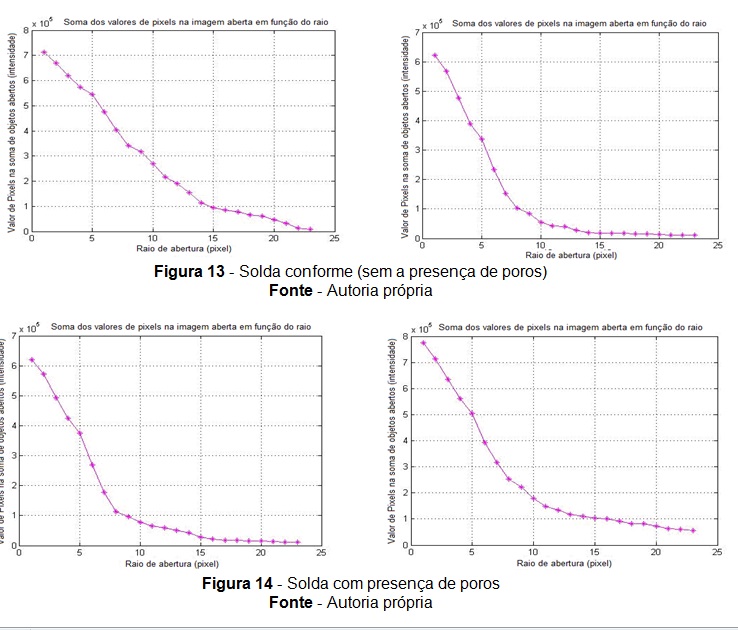
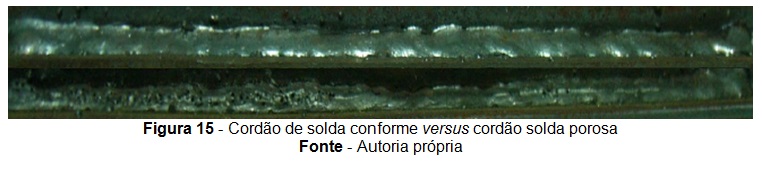
A leitura da imagem pelo filtro granulométrico resulta em um gráfico com o número de pixels presentes na imagem, a diferença é visível entre a solda conforme da Figura 13 e a solda com presença de poros da Figura 14.
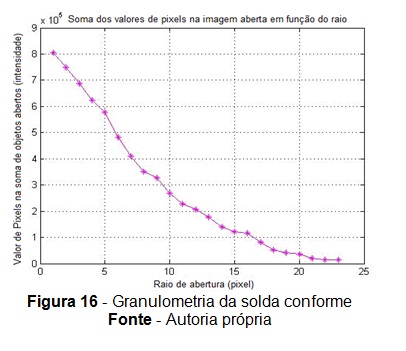
Para utilizar a Rede Neural é necessária a extração dos dados numéricos dos gráficos ge-rados a partir das imagens filtradas na granulometria. Esses dados foram gerados a partir das imagens recortadas dos corpos de prova, apresentados na Figura 15.
Nos corpos de prova foram produzidos 70 recortes, 60 deles aplicados na forma granulo-métrica, cujos valores gráficos extraídos foram utilizados no treino da rede; e os 10 restantes para a etapa de teste da rede e validação desta, apresentado na Figura 16
As imagens que apresentavam solda com presença de poros totalizaram uma menor con-tagem de pixels, sendo que sua nitidez foi comprometida, devido ao número de pontos de porosi-dade com pouca tonalidade.
Cada recorte foi ordenado de 01 a 36 são provenientes de cordões de solda conforme, e de 37 a 60 são de cordões de solda com presença de poros.
Os recortes passaram pelo filtro granulométrico, aplicados em uma escala de 23 pontos, Esses dados (XDATA) representam o número das amostras (entradas da RNA); e há uma saída (YDATA), os valores numéricos da curva granulométrica como previam diferenciação apresentada na rede das amostras boas e ruins.
Existe a necessidade de pré-processamento dos padrões de treinamento e teste, visando aspectos de melhoria do desempenho da RNA. As etapas de implementação envolvidas, na fase de treinamento, após o treino, a etapa de teste/validação (SILVA; SPATTI; FLAUSINO, 2010), da Figura 17.
Para o teste da RNA foram separados 10 recortes dentre as 70 imagens recortadas a partir dos corpos de prova pré-fabricados, dentre elas, 50% apresentavam solda conforme enquanto a outra metade solda com presença de poros. Os dados numéricos foram extraídos das imagens da e foram inseridos para o treino da rede, e foram acrescentados ao algoritmo de teste a fim de comprovar a eficácia da RNA treinada. Salienta-se que a RNA possui 23 valores de entrada e 1 valor de saída binário (0 para cordões ruins e 1 para cordões de solda bons).
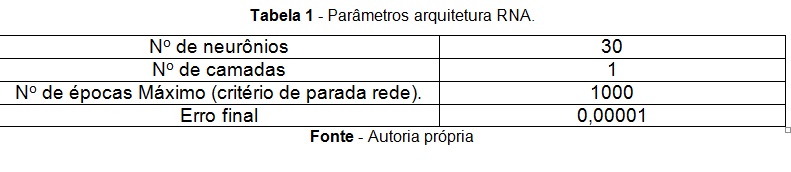
A Figura 17 mostrou o treinamento da RNA com erro de saída 10-5. Não foi possível au-mentar o erro de saída para 10-6, valor idealmente estimado em grande parte dos trabalhos na literatura, pela presença de ruído nas imagens. Com o valor do erro estabelecido foi possível atingir 100% de acerto, considerando valor 0.5 como linha de corte, satisfatórios por ser trabalho inicial e ter utilizado câmeras “of the shelf”, ou baixo custo.
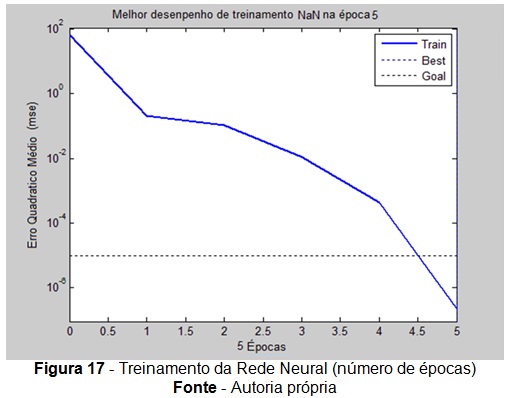
Pela observação do número de épocas e precisão da rede um número de 30 neurônios foi determinado, aplicando técnica de poda e reduzindo a proposta de arquitetura inicial (100 neurô-nios). Detalhes da Tabela 1, como número máximo de épocas, deve ser estimado; caso a RNA não atinja o erro estimado com esse número o processo de treinamento é encerrado. Uma época caracteriza um ciclo de treinamento da Rede com todos os valores de entrada e saída apresenta-dos para a mesma.
3 Resultados do Classificador Neural
Os resultados apresentados pelo classificador neural obtiveram uma porcentagem de acer-to de 100%, com 10 imagens separadas para o teste e validação da proposta. A aproximação ocorreu dentre as imagens numeradas de 1 a 5, correspondentes à solda porosa. A sequência de imagens de 6 a 10, contudo, corresponde à solda que apresentou o acerto com aproximação.
Na Tabela 2, apresentam-se os resultados numéricos estimados pela de saída da RNA de 0 e de 1, na tentativa de identificação de padrões.

Considerações Finais
Os resultados obtidos pelo classificador neural foram satisfatórios. Em amostras de testes com 10 imagens testadas na RNA, houve 10 acertos entre solda conforme e porosa, com aproxi-mações numéricas. Com realização de exaustivos testes alterando o erro de treinamento, foi pos-sível obter 100% de acertos nos diagnósticos numericamente apontados pelos testes da RNA. Em outras palavras, as respostas numéricas encontradas foram com boa aproximação da saída da rede. Com os valores de fronteira (zero e um) utilizados em tempo de treinamento.
De um modo geral, o classificador demonstrou autonomia, através de seus resultados é possível analisar dados extraídos de imagens de corpos de solda e estabelecer padrões.
Futuros trabalhos endereçam aplicações em mais áreas de análises de descontinuidades presentes em soldas industriais, utilizando câmeras de alta definição e mais ângulos de observa-ção. E, finalmente, futuros trabalhos também endereçam arquiteturas de RNAs mais modernas como, por exemplo, Máquinas de Aprendizado Extremo (ELM), Máquinas Desorganizadas, entre outras.
Espera-se ter contribuído com a área de controle de qualidade com a apresentação de um classificador autônomo, baseado em técnicas de tratamento de imagens e Redes Neurais Artifici-ais.
Referências
BARRETO, G. A. Percepton multicamadas e o algoritmo de retropropagação do erro. Publi-cação interna: Programa de pós-graduação em engenharia de teleinformática. Fortaleza: UFC, 2007.
BOCCATO, L. Novas Propostas e Aplicações de Redes Neurais com Estados de Eco. Tese de Doutorado. Universidade Estadual de Campinas. UNICAMP: Brasil, 2013.
BOCCATO, L.; SOARES, E. S.; FERNANDES, M. M. L. P.; SORIANO, D. C.; ATTUX, R. Unorganized machines: from turing’s ideas to modern connectionist approaches. Int. J. of Natural Computing Research, v. 2, n. 4, p. 1-16, 2011.
COSTA, M. A.; BRAGA, A. P.; MENEZES, B. R. Improved generalization learning with sliding mode control and the Levenberg-Marquadt algorithm. In Neural Networks, 2002. SBRN 2002. Pro-ceedings. VII Brazilian Symposium on, p.44-48, 2002.
GONZALEZ, R. C.; WOODS, E. R. Processamento de imagens digitais. São Paulo: Ed. Edgard Blücher Ltda, 2009.
HAGAN, M.; MENHAJ, M. Training feedforward networks with the Marquardt algorithm. IEEE Transaction on neural networks; 989-993; November, 1994.
HAYKIN, S. Neural Networks and Learning Machines. 3. ed. New York: Prentice Hall, 2008.
KOVÁCS, Z. L. Redes Neurais Artificiais. 2. ed. São Paulo: Editora Collegium Cognitivo, 1996.
MENDONÇA. M. Uma contribuição ao desenvolvimento de sistemas inteligentes utilizando redes cognitivas dinâmicas. Tese de Doutorado. Universidade Tecnológica Federal do Paraná. 2011.
MENDONÇA, M.; CASTANHO, J. E. C.; SILVA, I. N. D. Camera Calibration using neural network. WSCG 2002. Anais... 10. International Coneference in Central Europe, Pzen, Czech Republic, 2002.
MODENESI, P. J. Descontinuidades e inspeção em juntas soldas. Minas Gerais: Belo Horizon-te, 2001.
PEDRA, A. V. B. MENDONÇA; M.; FINOCCHIO, M. A. F.; ARRUDA, L. V. R.; CASTANHO, J. E. C. Camera calibration using detection and neural networks. 11th IFAC Workshop on Intelligent Manufacturing Systems, 2013.
RAMIREZ, J.E.; HAN, B.; LIU, S. Effect of Welding Variables and Solidification Substructure on Weld Metal Porosity. Metallurgical and Materials Transactions: Physical Metallurgy and Materi-als Science, v. 25A, n. 10, p. 2285-2294, oct. 1994.
RATNAN, M. M. Solder joint inspection with multi-angle imaging and an artificial neural net-work. Artigo Científico, Londres. 2008.
REHEM, A.; TRINDADE, F. H. V. Técnicas de visão computacional para rastreamento de olhar em vídeos. 06 Mar. 2014.
SANTOS, E, N.; SILVA, M. J.; ARRUDA, L. V. R. Reconhecimento de padrões e classificação de imagens de escoamentos bifásicos utilizando redes neurais. SBAI 2011, São Joao Del Rei, 2011.
SILVA, I. N. D.; SPATTI, H.; FLAUZINO, R. A. Redes Neurais Artificiais para engenharia e ci-ências aplicadas. São Paulo, 2010.
SPANDRI, R. Introdução a redes neurais. Controle & Instrumentação, São Paulo: Editora Técni-ca Comercial Ltda, n. 43, p. 68-73, fev. 2000.
VERBANCSICS, P.; HARGUESS, J. Image Classification Using Generative Neuro Evolution for Deep Learning. In Applications of Computer Vision (WACV), 2015 IEEE Winter Conference on, p.488-493, 5-9, jan. 2015.
ZHANG, S.; LIU, H-X.; GAO, D-T; WANG, W. Surveying the methods of improving ANN generali-zation capability. In Machine Learning and Cybernetics, 2003, International Conference on, v.2, p.1259-1263, 2-5, nov. 2003.
Recebido em 16/02/2015
Aceito em 09/11/2016
Revista Científica On-line Tecnologia – Gestão – Humanismo - ISSN: 2238-5819
Faculdade de Tecnologia de Guaratinguetá
Revista v.6, n.2 – novembro, 2016